


Stepper motor linear actuators (SMLAs) combine a stepper motor, precision lead screw and nut in one compact envelope, providing a highly configurable, customizable and robust solution for linear motion. With the help of a motion controller and a stepper driver, all SMLAs can be programmed to position a load to a precise location. However, standard configurations do not provide a feedback mechanism that tells the operator whether the move is completed or not.
Although not essential for many applications, feedback can be a powerful tool to utilize in more sophisticated linear motion systems. Because of this and the increasing demand for precise load positioning information, outfitting an SMLA with an encoder can be an effective and simple solution to get real-time motion feedback about your application.
SMLA core configurations
Figure 1 shows three of the most common SMLA constructions: a motorized lead screw (MLS), motorized lead nut (MLN) and motorized linear actuator (MLA). Each of these constructions has a stepper motor, lead screw and nut at its core, but differ in how it obtains motion.
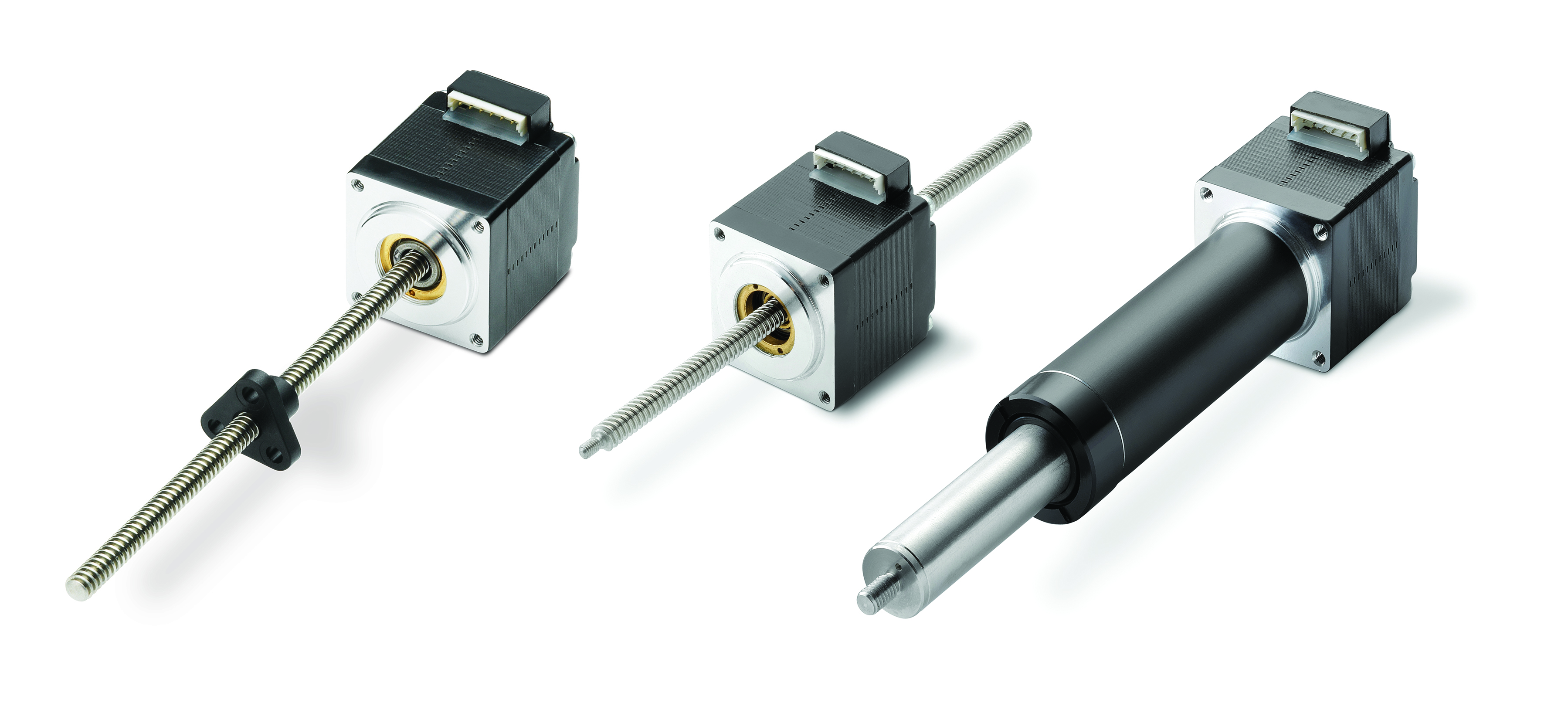
Figure 1. SMLA types (From left to right: MLS, MLN and MLA). Image courtesy of Thomson Industries, Inc.
For MLS units, the lead screw attaches directly to the motor shaft, which translates the nut on rotation. MLN units integrate the nut inside the motor shaft, which when rotated, translates the lead screw instead of the nut. MLA configurations are essentially MLS units with additional components that house the lead screw and nut while also providing integrated support and guidance.
Open loop linear actuation
Figure 2 depicts open-loop SMLA architecture that applies to all configurations. Users interact with the system through a human machine interface (HMI). They program the desired motion sequence into the motion controller, which sends it to the stepper motor drive for conversion and amplification before transmitting it to the SMLA, which makes the moves. The communication pathway is unidirectional; neither the motion controller nor the HMI ever receives any notification that the intended move has been completed successfully.
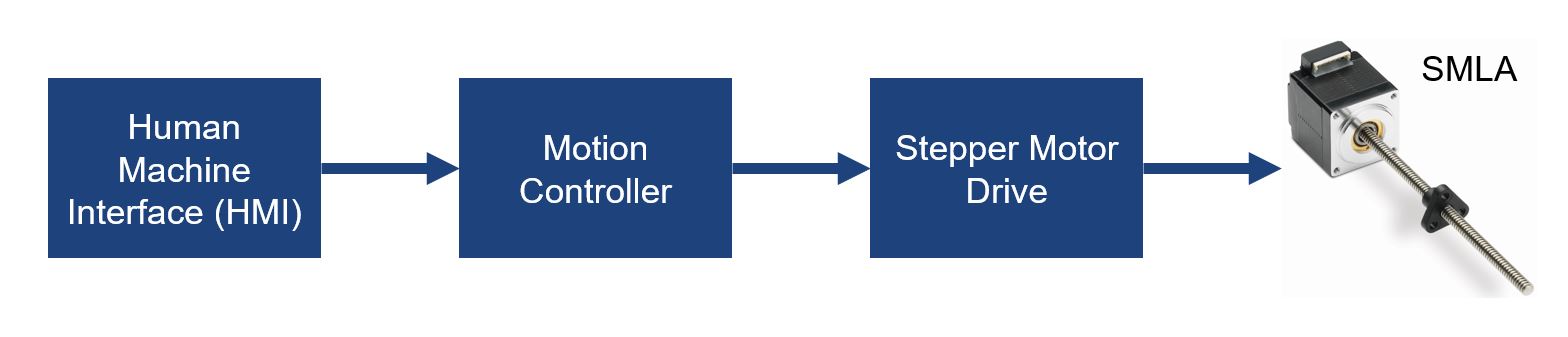
Figure 2: Architecture for a basic open loop system setup to drive an SMLA. Image courtesy of Thomson Industries, Inc.
Knowing exactly where a load is positioned is critical for many high-precision applications such as medical instruments, measuring devices and laboratory equipment. Also, certain applications can power off unexpectedly or have their load forced out of position. In such scenarios, it would be impossible to know the exact position of the load without using a feedback mechanism.
A good example of an application that benefits from the functionality of an encoder is automated pipetting machine. (Figure 3) These devices utilize an encoder on the horizontal axis to accurately track the location of the dispensing pipette and ensure fluid is transferred to the proper test tube. Other examples include fluid pumps, 3D printers and XY stages.
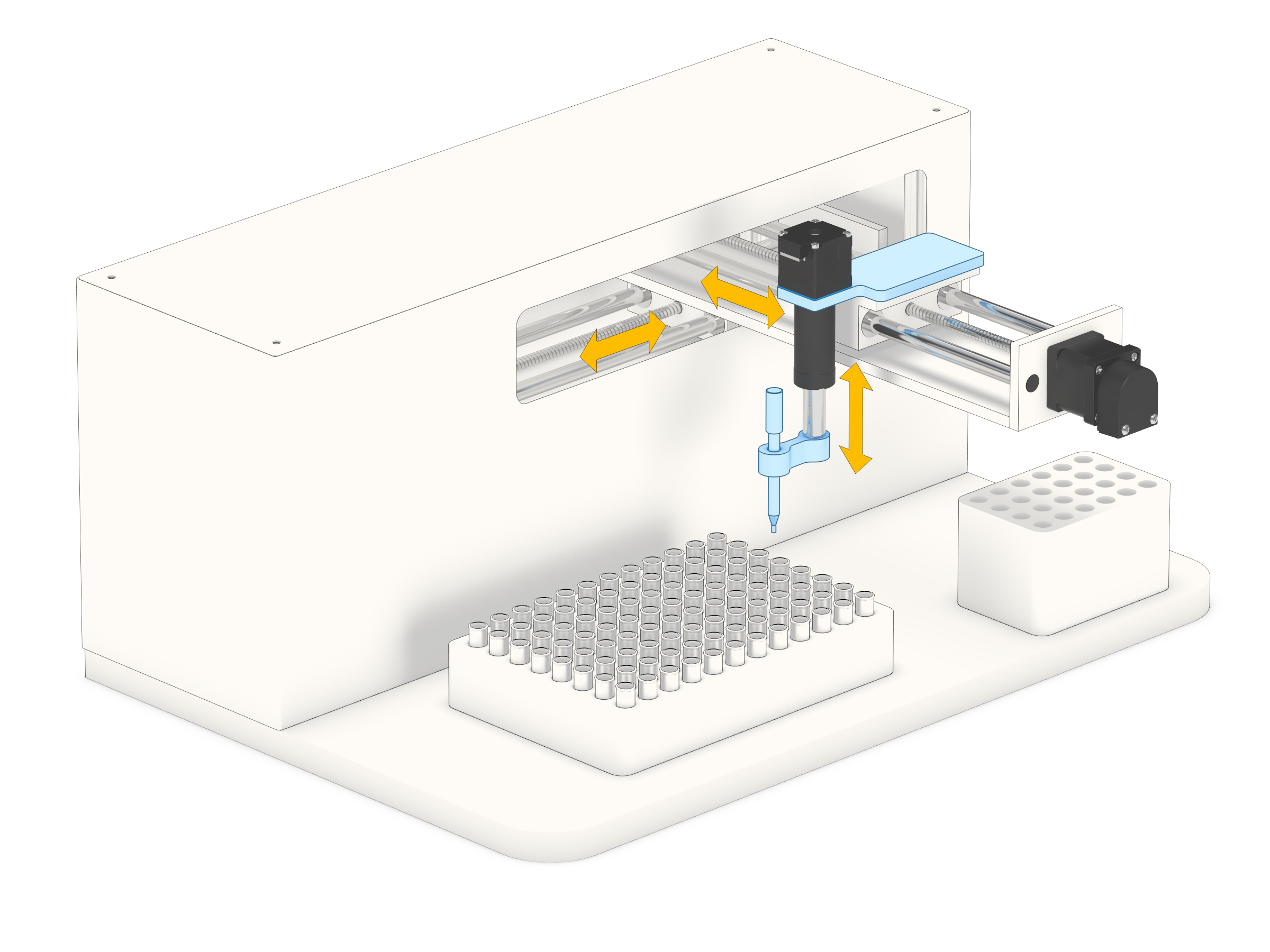
Figure 3: Automated pipetting machines can utilize an encoder on their horizontal axis. Image courtesy of Thomson Industries, Inc.
Closing the loop with optical rotary encoders
Many SMLAs can be outfitted to provide feedback by adding a rotary encoder. Rotary encoders, also known as shaft encoders, convert the angular position of a shaft to analog or digital output signals. Optical rotary encoders are the most common option for adding feedback functionality to SMLA assemblies. Figure 4 illustrates how adding an encoder to an SMLA can provide feedback to the controller and share important motion data such as position, speed or direction.
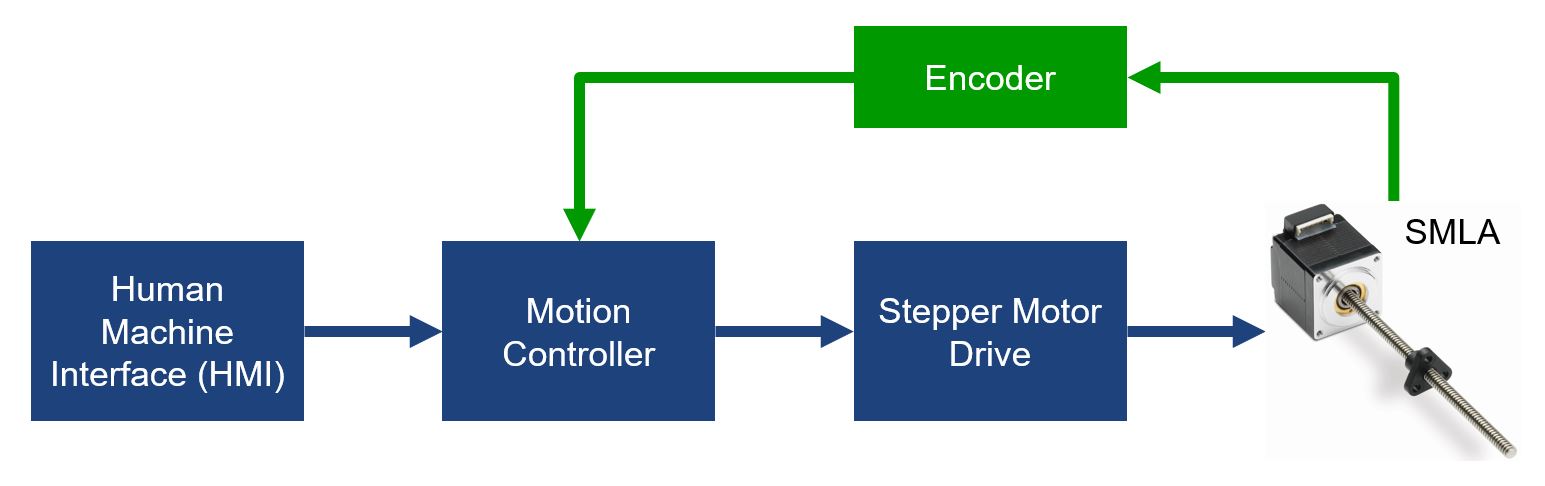
Figure 4: Architecture for a basic closed loop system setup to drive an SMLA. Image courtesy of Thomson Industries, Inc.
Getting position with encoders
There are two main types of rotary encoders: incremental or absolute. (Figure 5)
Incremental rotary encoders use a rotating disk connected to a shaft and positioned between a light source and a photo sensor. Multiple slits arranged uniformly around the perimeter of the disk allow light to pass to the sensor in patterns of pulses representing motion characteristics.
Applications requiring even more detailed motion data or an added level of protection, if power is lost, would benefit from an absolute encoder. Like incremental encoders, absolute encoders are center mounted to spin with the motor shaft between a light source and a photo sensor. Instead of using uniformly arranged slits like an incremental encoder, absolute encoders use an intricate arrangement of unique openings over a much larger surface of the disk. These interrupt the light signals in patterns that a detector chip can read as higher-fidelity representations of every angular position of the stroke – even without a homing device.
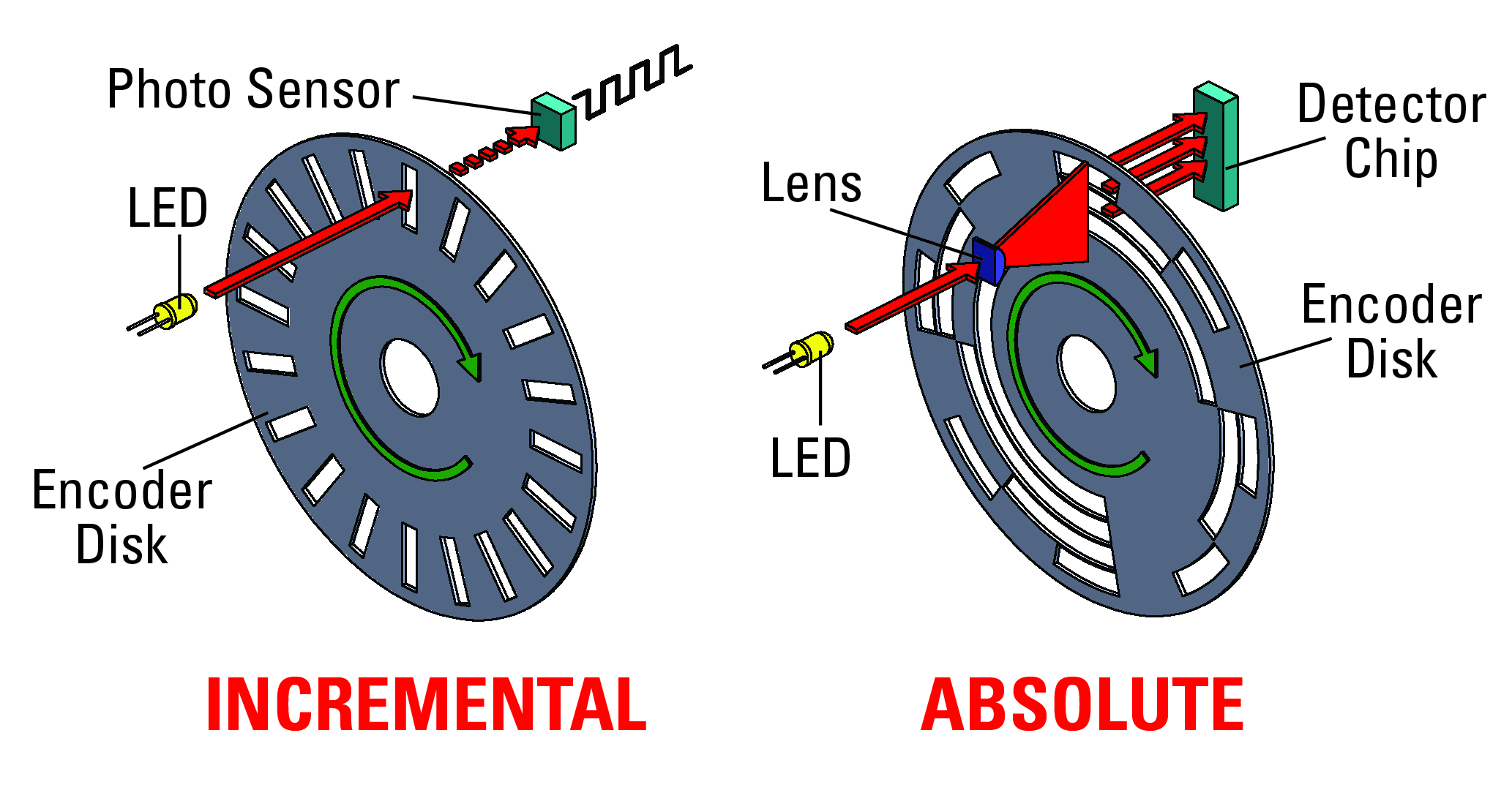
Figure 5: The processes for incremental (left) and absolute encoders (right) are illustrated above. Image courtesy of Thomson Industries, Inc.
Implementing rotary encoders
In many cases, encoders can be integrated into all three SMLA configuration types (MLS, MLN and MLA). Only a flat surface is required to bolt the encoder body onto and a shaft on which to mount the optical disk. The shaft must be an extension of the original motor shaft so that the optical disk can rotate with it to capture the motor’s motion accurately, as shown in Figure 6.
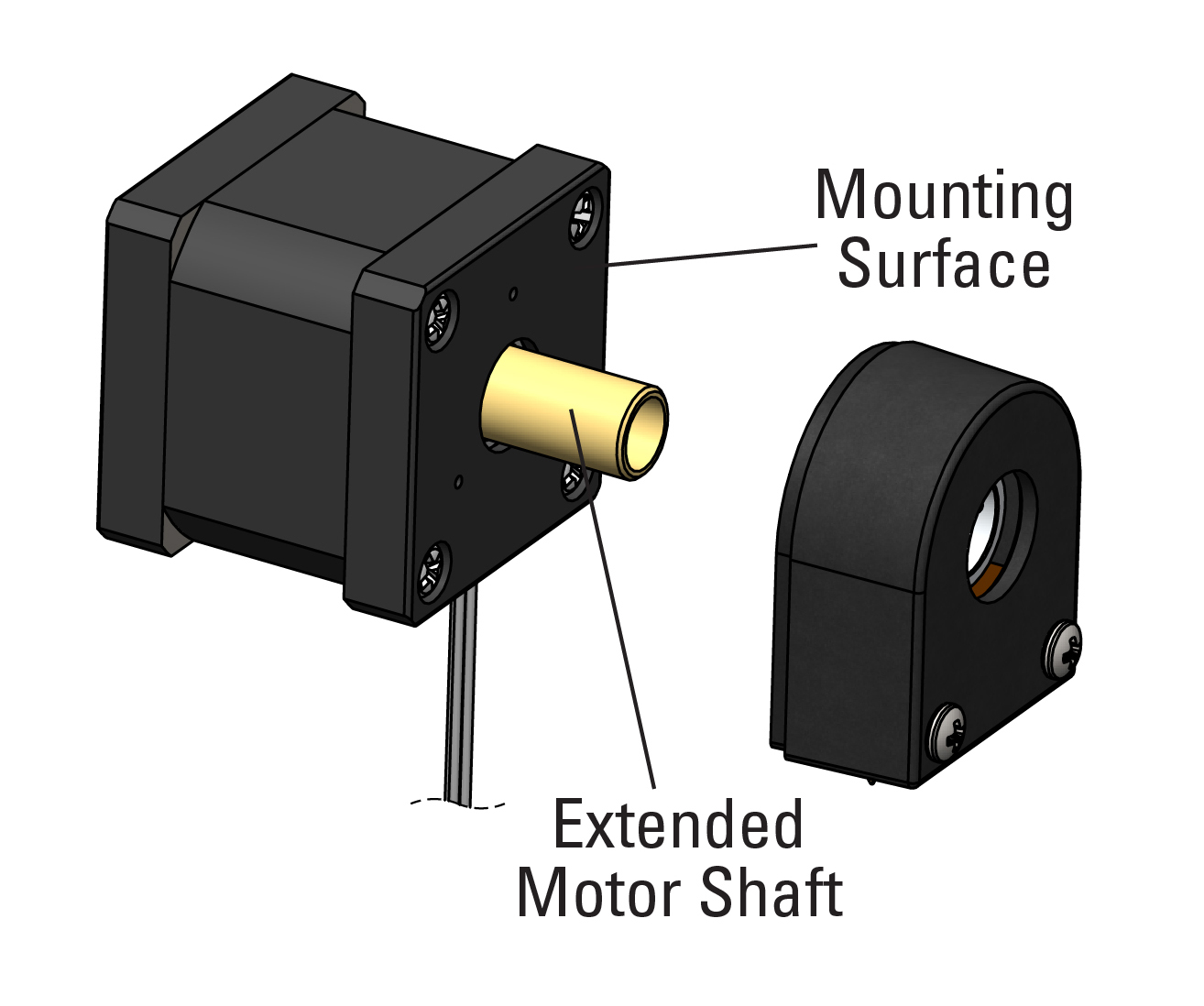
Figure 6: Installation of an encoder onto an encoder-ready motor with the required protruding shaft and mounting surfaces. Image courtesy of Thomson Industries, Inc.

SMLAs with added optical encoders (From left to right: MLS, MLN and MLA). Image courtesy of Thomson Industries, Inc.
Stepping up
While open-loop SMLA systems are suitable for many applications, stepper motor users wanting real-time feedback on load position should consider adding encoders to their motors. Encoders can provide position feedback, real-time data on speed, direction and other characteristics, while improving control and monitoring of the load. For basic positioning feedback, users should specify incremental encoders, but if high precision is required or the ability to maintain position once the equipment is powered on, they should consider absolute encoders.
Closing the feedback loop with optical rotary encoders not only meets the demands of today's precision applications but also positions SMLAs as valuable components in the evolving landscape of Industry 4.0 and digital connectivity innovation, ensuring their continued relevance and effectiveness in the next generation of industrial automation.